
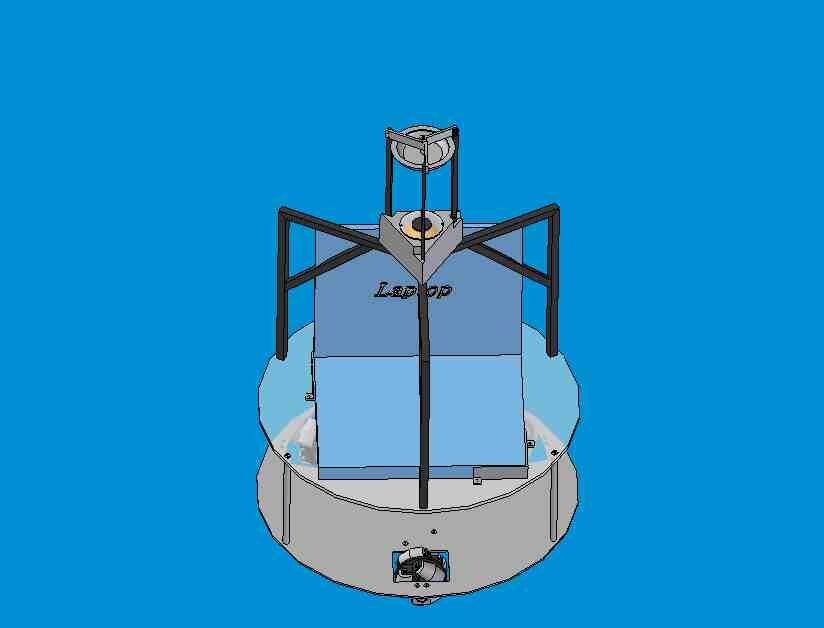
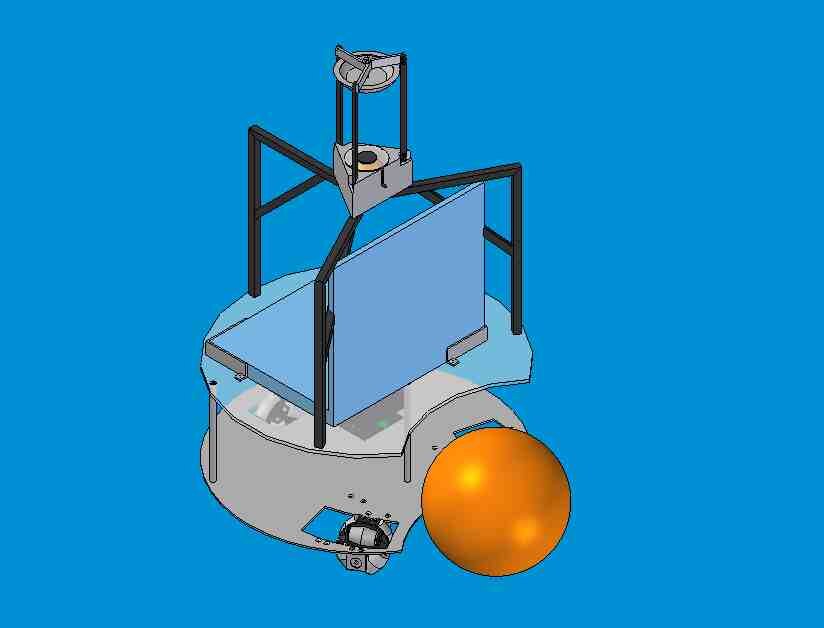
The aim of this project is the design and construction of a fully autonomous mobile robot as a flexible platform for research in the area of robotic multi-agent systems and artificial intelligence. The robot will be designed in conformity with the regulations for the Middle-Size League (MSL) of the international robotic soccer competition RoboCup.
Using RoboCup as test-bed, the project aims at developing new control strategies for collaborating multi-agent systems of autonomous mobile robots in a complex and dynamic environment. It is planned to build a competitive team which could enter the 10th RoboCup world championships in 2006.
This project has been launched in March 2004. Students from Mechatronics, Mechanical Engineering, Computer Science and Electrical and Electronics Engineering are invited to join the team. A lot of work will have to be done on the hardware as well as on the software. For further information, please contact Frank Wornle, Engineering South, room S204.
Links:
Rules:
Official rules of the RoboCup Middle-Size League (2004) Amendments to the set of rules (2004)Contact:
The teamOpen projects: