FG4 Vision Tools
A simple MATLAB interface to the
Phytec Framegrabber 4 video capture card
and the
Color Machine Vision algorithms CMVison.
<![if !vml]>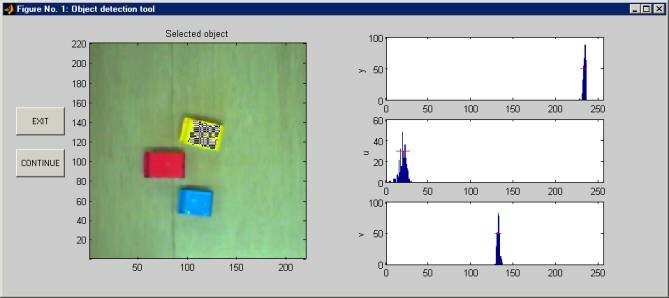 <![endif]>
<![endif]>
Before starting to read the presentation of the basic material, please note that the text contains special terminology, more details about unclear points in elite writing.
The toolbox FG4 Vision Tools comprises a small collection of MATLAB drivers for the Phytec Framegrabber 4 video capture card (http://www.phytec.com). Both CMEX drivers as well as S-Functions have been developed to provide high-level access to the underlying hardware as well as to the algorithms of the Color Machine Vision project CMVision. A user can thus work with a stream of live images from the MATLAB command line (CMEX interface) or by using intuitive Simulink blocks (S-Functions). FG4 Vision Tools can be downloaded here.
Some of the toolbox commands include rudimentary image processing capabilities. It is possible to classify image contents according to a programmable colour range and/or object size criteria. The vision algorithms can be used to determine the centroid coordinates of a detected object. The automatic tracking of coloured objects is particularly useful in machine vision based robotics applications such as the RoboCup challenge and other camera controlled multi-agent systems.
Internally, the drivers gain access to the video capture card through calls to functions provided by the Phytec runtime library Gr4cdll.dll. Classification of the acquired image data is performed using the algorithms of the Color Machine Vision project (CMVision). This project is an initiative of the CORAL group at the Carnegie Mellon School of Computer Science. The source code of this software collection has been published under the GNU General Public License (GPL) and can be downloaded from the projects home page at http://www-2.cs.cmu.edu/~jbruce/cmvision/. CMVision provides a simple, robust vision system suitable for real time robotics applications by means of global low level colour vision at video rates without the use of special purpose hardware.
FG4 Vision Tools is distributed as Free Software under the terms of the GNU General Public License Agreement (GPL). This gives a user the right to copy, re-distribute and modify the source code of the toolbox to suit any of their needs.
Frank Wornle ()
The University of Adelaide
School of Mechanical Engineering
December, 2003